




达芬奇手术模拟器RoSSII
达芬奇手术模拟器RoSSII
初识 RoSS II™
RoSS II™是针对Intuitive Surgical的da Vinci Surgical System(dVSS)的培训解决方案。这是一款便携式,独立的机器人手术模拟器,可面向临床医学系学生、新手医师和专业医生教授等人员,使他们熟悉dVSS并高效练习dVSS所需的基本操作、知识和程序技能。
RoSS II™是唯一能实现3D实境和触觉反馈的沉浸式全程手术操作模拟的机器人手术模拟器,该项功能也称为HoST(手术技能培训)。
RoSS II™使用虚拟现实技术向用户介绍机器人辅助手术的基础知识。它拥有16个经过严密设计和验证具备不同难度的基础训练课程,可以有效教导用户由易而难逐步掌握并提高机器人手术操作技能。
Robitic Skill Assessment(RSA)机器人手术技能评估系统可以快速准确地客观评估参训学员的达标情况,并将测得的培训成绩集中存储在集成管理数据库中,以便轻松导出到Excel。
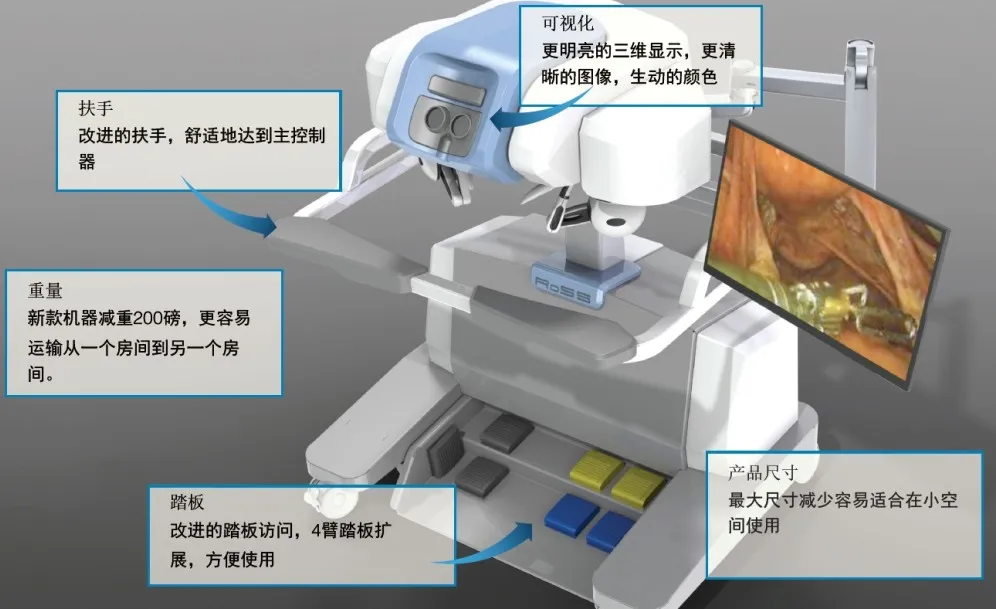
RoSS II™外观

RoSS II™ 结构图

可视化
更明亮的三维显示,更清晰的图像,生动的颜色

扶手
改进的扶手,舒适地达到主控制器
产品尺寸
最大尺寸减少容易适合在小空间使用

踏板
改进的踏板访问,4臂踏板扩展,方便使用
重量
新款机器减重200磅,更易在科室间运输
1、具备万向轮的独立控制台便于搬运能安置于任何地方
2、集成管理系统能存储所有用户的培训标准和已执行任务的完成情况
3、HoST(手术技能培训)模块应用实际手术案例来实现无与伦比的真实手术场景
4、可根据客户要求定制客户专属的模拟训练服务
5、循证数据证实的可靠机械电气性能
6、符合人体工程学的设计令每位用户均可调节使用
HoST™由经验丰富的机器人辅助外科医生开发,用于培训新手外科医生。
RoSS的HoST™模拟手术病例由经验丰富的医生负责撰写添加
• HoST软件套件是一项突破性的虚拟现实机器人手术仿真系统,通过在真实记录的达芬奇外科手术视频中整合入专门开发的触觉反馈和术野全景,给客户提供身临其境,无与伦比的逼真手术实践环境。HoST只能在RoSS系统上使用,且可以反复练习。

基于虚拟现实的训练
RoSS II™机器人手术模拟器提供4大模块16款专门研发的技能培训科目,涵盖了达芬奇机器人手术所需的钳夹,镜头和离合器操控,组织切割和电刀烫凝等所有手术技能,训练难度逐级增加。借助高保真手术实景模拟和由易而难的三级进阶手术任务训练,有效帮助学员学习和掌握机器人手术空间认知和运动技能,更快上手独自施行机器人辅助手术。

模块 1►定向技能
器械操控---该任务教授学员如何移动机械臂,并帮助学员去体会和适应操作RoSS™控制台的感觉。
镜头操控---此任务教授学员如何使用镜头
协同操控---此任务教授学员如何协同操控镜头和离合器
第四机械臂操控---此任务教授学员如何使用第四机械臂
模块 2►运动模块
落球---这项任务通过将球捡起投入指定的托盘来培养学员准确操控手术器械的能力
置球---这项任务帮助学员通过捡起球并将其放置在柱顶来加强对手术器械的精确控制
空间控制I---此任务中,学员必须将圆环穿过一段弯曲的线而不碰触曲线,以加强他们对手术空间感知,器械操控和精细运动的能力。
空间控制II---此任务中,学员必须将一根线穿过一系列圆环而不碰触,以进一步强化他们对手术空间感知,器械操控和精细运动技能。
模块 3►基础手术技能
持针---此任务教学员如何正确握持手术缝针及调整持针部位
弃针---此任务教学员如何将手术缝针正确传递给床旁助手
基础电灼---此任务教学员如何使用电刀
组织切割---此任务教学员如何使用手术剪切断组织
模块 4►中级手术技能
组织牵拉---该任务需学员使用之前获得的手术技能,协同操控第四机械臂以牵开组织暴露术野
组织钝性分离---该任务需学员结合以前掌握的技能,通过协调控制器械和镜头来钝性分离两层组织
血管剥离---该任务需学员结合以前掌握的技能,通过协调控制器械和镜头来解剖剥离血管
手术打结---此该任务要求学员结合以前掌握的技能,通过协同控制器械来有效地完成常见的外科手术打结
#RSA评分–机器人手术技能评估#
RoSSII™通过内置的FSRS机器人手术基础技能,就基于虚拟现实的评估标准创建了一套标准化评分系统。该机器人手术技能评分RSA能使培训人员快速而准确地评估学员的培训表现。学员培训结束并通过包含RoSS认证课程四大模块培训内容构成的限时测试便可获得RSA评分。它是由包括手术区域安全、严重失误、节省、双手灵活度和时间组成的复合指标系列的加权平均值。下表列举了每个复合指标的分值范围,平均分值和权重。
联系我们/CONTACT US
| 关注我们
|
 联系电话:0531-
联系电话:0531- 公司传真:0531-82959351
公司传真:0531-82959351 企业邮箱:Jasenlin@ridtmedical.com
企业邮箱:Jasenlin@ridtmedical.com 公司地址:济南市历下区龙鼎大道零号海尔绿城中央广场
公司地址:济南市历下区龙鼎大道零号海尔绿城中央广场
COPYRIGHT © 2015-2022 润德天医疗用品有限公司 ALL RIGHTS RESERVED